 Русский
Русский Deutsch
Deutsch English
English Español
Español












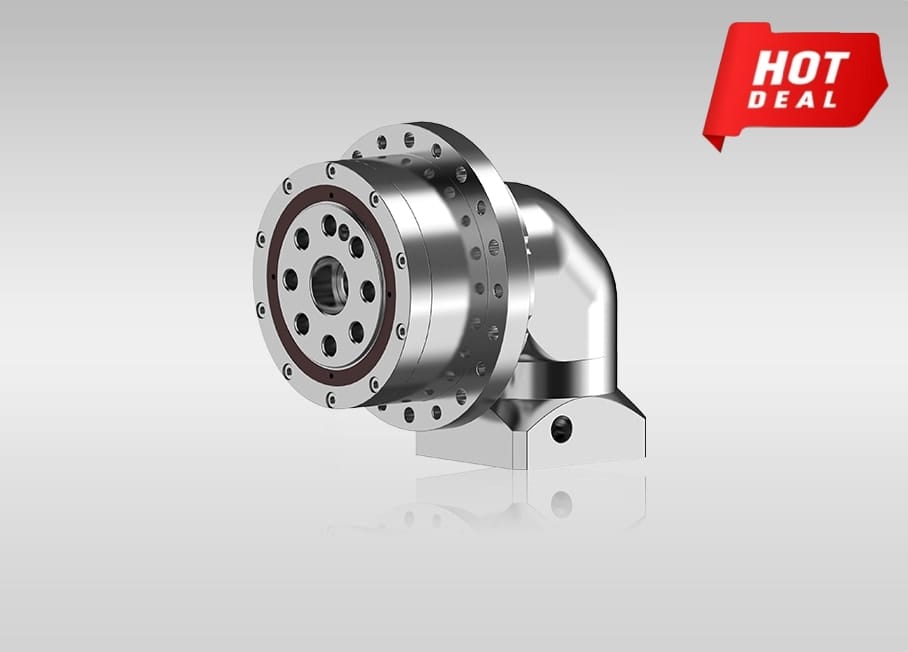
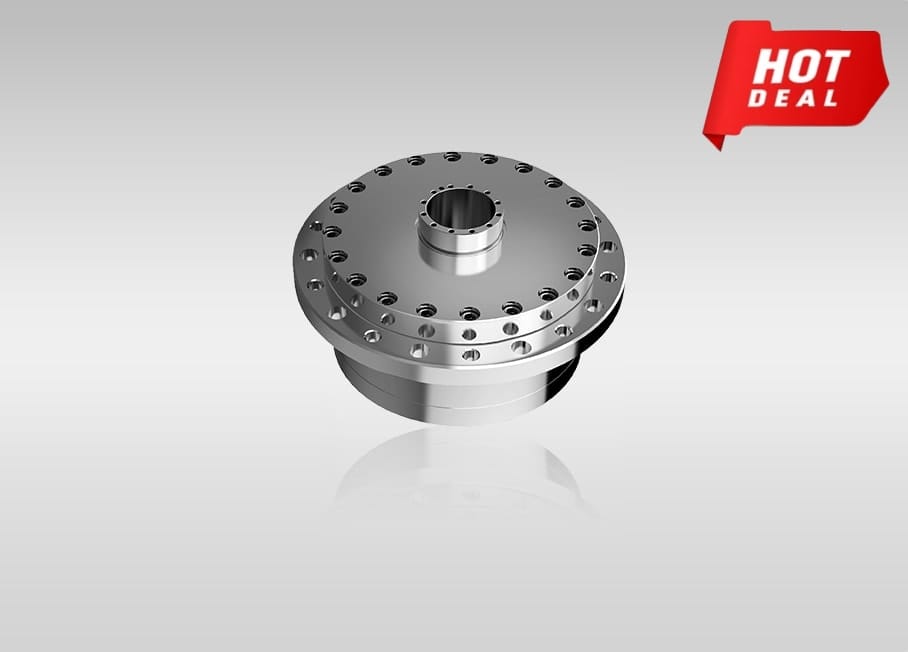
Полая конструкция редукторов RV серии WRV-C обеспечивает:
1. Большой диаметр полого отверстия, обеспечивающий гибкость конструкции. Полый центр облегчает прокладку проводов, труб и валов, позволяет увеличить пропускную способность проводов и позволяет размещать внутри большие кабели. Это позволяет избежать взаимодействия между корпусом робота и периферийным оборудованием, а также снизить изгибающие и растягивающие нагрузки. 2. Встроенные радиально-упорные шарикоподшипники, воспринимающие внешние нагрузки, обеспечивают высокую жесткость на изгиб и учитывают высокие допустимые изгибающие моменты, повышая надежность. 3. Двухступенчатая конструкция понижения:Более медленная орбитальная скорость качающегося механизма приводит к снижению вибрации. Прямое соединение между двигателем и входным редуктором снижает инерцию.
4. Структура поддержки планетарного носителя:Высокая жесткость на кручение, низкий уровень вибрации и высокая ударопрочность.
5. Контакты роликового подшипника:Низкий пусковой момент, низкий износ, длительный срок службы и малый люфт шестерни.
6. Конструкция качающегося и шлицевого механизма:Малый люфт шестерни и высокая ударопрочность.
Одновременное зацепление нескольких зубьев качающейся и шлицевой шестерни эффективно противостоит ударным нагрузкам.
Область применения
Подходит для широкого спектра применений
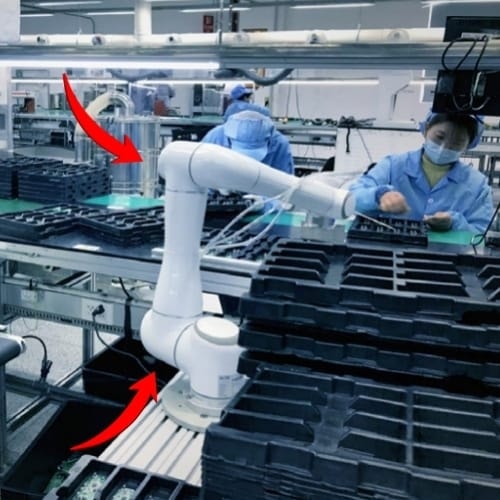
Кооперативный робот
Многосуставной аппарат

Станок для лазерной резки
Станок, шлифовальные станки

ПАРАЛЛЕЛЬНЫЙ МАНИПУЛЯТОР
Роботы Scara, рука-паук...

ПРОМЫШЛЕННЫЙ РОБОТ
Манипулятор, осевой робот и т.д

ЧЕЛОВЕКОПОДОБНЫЙ РОБОТ
Бионический робот, шагающие роботы
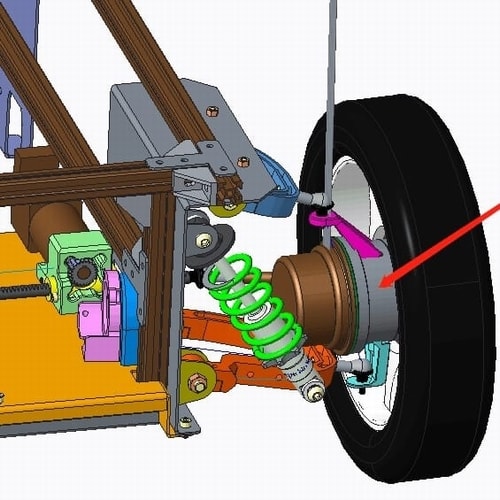
AGV CAE
Складская логистика AGV car
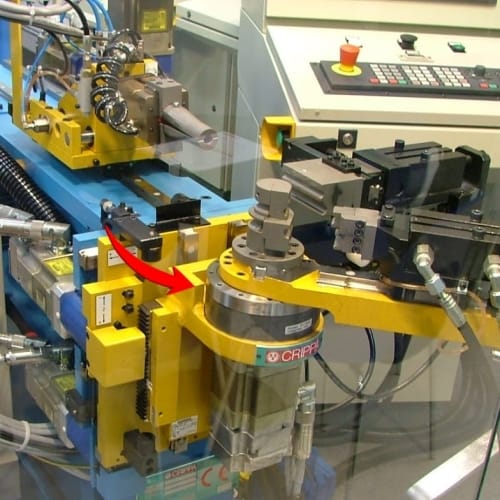
МЕХАНИЧЕСКИЙ ИНСТРУМЕНТ
Станок для гибки труб...
Резьбонарезной станок с ЧПУ
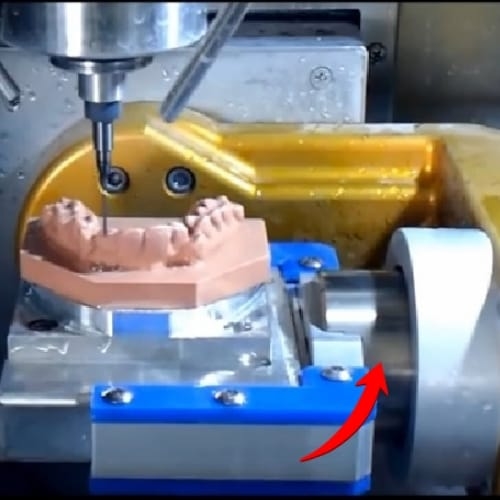
Вырезание и печать зубных протезов

ВНЕШНИЕ РОБОТЫ
реабилитация бобоt...
Заводы Fubao Mechanical Tech











Теперь предложение